
LoCO AUV is a Low-Cost Open-Source Autonomous Underwater Vehicle intended for use by school groups and research groups with low levels of funding and personel. LoCO can be assembled with little technical knowledge from approximately $4000 USD worth of off-the-shelf and custom parts, and can be operated and deployed by very small teams.
Current Features
- Tethered and tetherless operation.
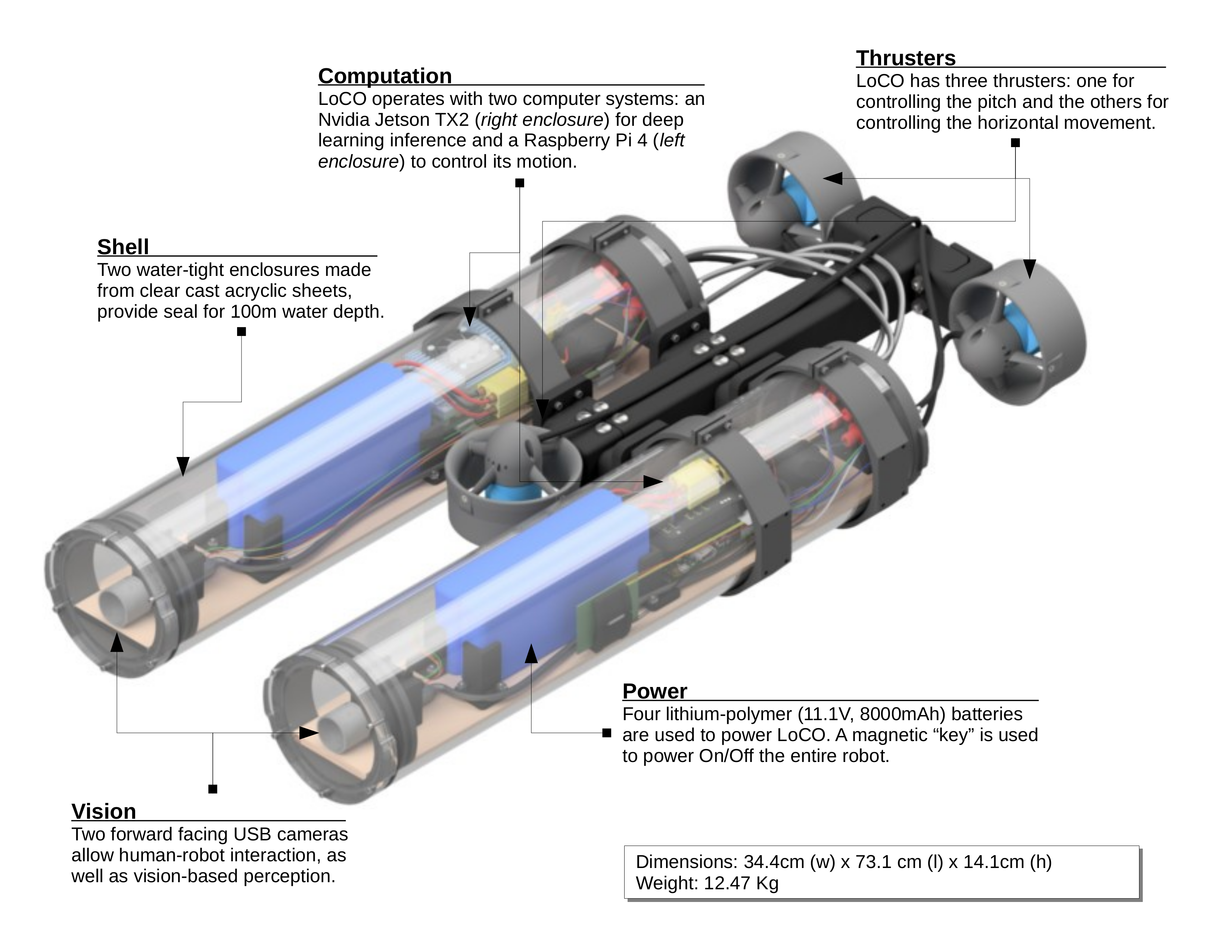
- Dual cameras for computer vision guidance.
- NVIDIA Jetson TX2 processor for deep learning inference.
- Basic state estimation.
- Human-Robot Interaction capabilities such as diver following, gesture detection, and robot communication via motion.
- A Gazebo-based simulator for algorithm prototpying.
- Autonomous human-in-the-loop control system for paired human-robot tasks.
LoCO AUV is currently being tested and documented for a full version 1.0 release, and awaiting University clearence for release under a permissive open-source license.